Coupling Types - Kinematic Couplings
The fully kinematic coupling represents the gold standard of couplings by using individual point contacts that each constrain a single degree of freedom. Because the interaction between the interface surfaces can be described by six distinct points, closed loop mathematics can be formulated to deterministically describe the relationship between the surfaces. In reality, point contacts must typically tolerate high loads, therefore the theoretical point contacts deform into Hertzian contact ellipses under large applied loads. The main limit to the repeatability of a kinematic coupling is the surface finish of the contact regions, while load capacity and stiffness are limited by the Hertzian contact stress.
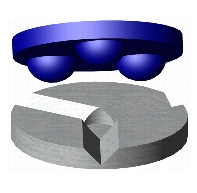
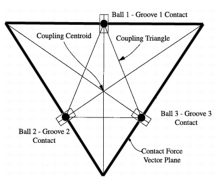
By far, the most common form of the standard kinematic coupling is the ball- groove coupling, which interfaces three balls on one component to three grooves on the opposing component. The balls and grooves are placed on the three points of a planar equilateral triangle with the triangle sides coincident to lines passing through the contact points. The typical coupling structure is shown below with the standard coupling geometry terminology.
|
|
| Three Ball - Three Groove Coupling | Standard Coupling Geometry |
More information on the design and use of kinematic couplings can be found in following pdf documents:
- A. Slocum. "Design of Three-Groove Kinematic Couplings." (Copyright ASPE)
- A. Slocum. "Kinematic Couplings for Precision Fixturing - Part 1: Formulation of Design Parameters." (Copyright ASPE)
- A. Slocum and A. Donmez. "Kinematic Couplings for Precision Fixturing - Part 2: Experimental Determination of Repeatability and Stiffness." (Copyright ASPE)