Kinematic Couplings Case Studies
Recent research focuses on applying kinematic couplings to improve the accuracy and repeatability of various products and processes, including:
- Industrial Robotics - Installation, replacement, and calibration of industrial robot manipulators and major robotic subassemblies. Researching students are John Hart and Pat Willoughby in partnership with ABB and Ford.
- Fabrication of Silicon Devices - Researching student is Alexis Weber.
- Automotive Engine Components - Past work in this area was completed by Prof. Martin Culpepper.
- General Coupling Research
Quick Change Modules for Industrial Robotics
In September 2000, work commenced between the MIT PERG and several industry partners (primary partners are ABB and Ford) to create mechanical and information technology interface standards that will enable tooling and automated factory systems to be rapidly interchanged, without requiring recalibration or reprogramming. The most apparent application of this research is to robotics, for which the standards could enable a complete robot or a subassembly, such as a wrist, to be changed easily without recalibration of the robot. Using kinematic couplings, the wrist and/or robot body would mate to a standard master plate that would be located at the robot manufacturer and offline at the factory. Each subassembly would be calibrated with respect to the mounting plate master. An identical coupling interface is present on the matching part (the robot arm or factory floor). Thus when a replacement subassembly is delivered to the factory, it comes with a set of calibration coefficients with respect to the mounting plate master, and it can be "plugged into place and start working". If a subassembly were to fail during use, it could be "unplugged" and a new subassembly could be "plugged in" and used without having to recalibrate it to the line. Using available open-source Internet architecture techniques, relational databases, and process monitoring software, an active web-based information system could be developed to manage component and system-level design, implementation, and maintenance of this standard.
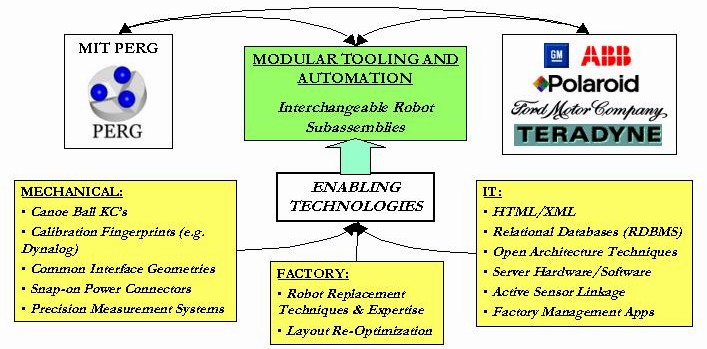
Enabling technologies for development of modular robot subassemblies.
Robots are "plugged into" standard line-side base-plates utilizing Canoe Ball KC's, and start working without online calibration and programming.
With the eventual goal of the project to establish standards for modular robot interfaces, the full scope of development would include:
- Robots to be quick-changed on the factory floor without reprogramming or recalibration (within size/payload classes).
- Robot subassemblies and end-effectors of different manufacturers to be quick-changed without reprogramming or recalibration.
- Robots to be programmed offline directly or using simulation with full confidence in path accuracy when the robot is installed.
- Robots to be controlled by a central server relaying program instructions in the a standard language.
- Robot configuration data and robot process capability data to be monitored remotely via an Intranet site.
- Repeatability of the quick-change process high enough to enable optimal rotation of robot equipment to maximize life cycles.
Student researchers in this area are:
John Hart (M.S. 2000- 2002) - Primary project is the development of exchangeability of complete robot, including mechanical design and information management. A related robotics project is a calibration pose set sequence optimization.
Pat Willoughby (M.S. 2000- 2002) - Primary project is the development of an exchangeable wrist unit. A related project is the development of the Wonder Wyler calibration unit.
Research into the field of industrial robotics have resulted in the following documents:
- ASPE 2001 Conference Poster - A small scale calibration device was presented in the poster sessions of the conference. A PDF format of the poster is available here: ASPE Conference Poster 2001-11-10.pdf.
- ASPE Paper - A summary paper on industrial interchangeability has been submitted for publication with the ASPE.
- Master's Theses - Work on the industrial robotics has resulted in the Master's Theses for John Hart and Patrick Willoughby.
- Work in progress page - Presents some historical information on theses for Hart and Willoughby.
- Proposal for A Non-Contact Laser Wireless Measurement Unit and System for Active Dimensional Troubleshooting and Verification by Hart
Semiconductor Fabrication
In 2000, research was begun to determine the applicability of large scale alignment techniques for alignment of small scale silicon devices. Current fabrication of silicon device wafers requires active alignment of components, typically using optical alignment techniques. By incorporating kinematic coupling features on wafers, accuracy and repeatability can be improved through passive techniques.
A passive mechanical wafer alignment technique, capable of micron and better alignment accuracy, was developed, fabricated and tested. This technique is based on the principle of elastic averaging: It uses mating pyramids (convex) and grooves (concave) elements, which have been previously patterned on the wafers, to passively align wafers to each other as they are stacked. The concave and convex elements were micro-machined on 4 inch (100) silicon wafers using wet anisotropic (KOH) etching and deep reactive ion etching. Repeatability and accuracy 1 mm and better was shown through testing. Repeatability and accuracy were also measured as a function of the number of engaged features. Sub-micrometer repeatability was achieved with as little as 8 mating features. Potential applications of this technique are precision alignment for bonding of multi-wafer MEMS devices and 3-D interconnect IC’s, as well as one-step alignment for simultaneous bonding of multiple wafer stacks. Future work will focus on minimizing the size of the features.
The researching student is Alexis Weber. More information about kinematic coupling application to the semiconductor field can be found in Weber's Masters Thesis.
Automotive Engineering
Past work in the automotive area was completed by Prof. Martin Culpepper through research into Quasi-Kinematic Coupling Design. The following presentations and documents summarize the work done:
- Kinematic Couplings for Precision Location
- Flexural Kinematic Couplings for Precision Manufacturing
- Design and Application of Compliant Quasi-Kinematic Couplings (Doctoral Thesis)
- Also see current research at http://psdam.mit.edu/
General Kinematic Coupling Developments
Several members of Prof. Culpepper's PSDAM Lab have begun research into the Wavy Kinematic Spring Washer, a standardized test fixture and a variety of other projects. Please visit the PSDAM Lab as well as the Low Cost KC's Page for Prof. Slocum and Culpepper's 2.75 Precision Machine Design Course.
Please refer to the list of references on the KC Reference Page for a more complete listing of research done both by PERG members and other laboratories. The following general precision design projects were conducted by members of the MIT PERG Lab:
General Machine Design Principles by Layton Carter Hale (Ph.D. 1999)
- Principles and Techniques for Designing Precision Machines - Adobe PDF available from Lawrence Livermore National Laboratory under document UCRL - LR - 133066.
General KC Design by Robert Vallance (Ph.D. 1999)
- Precision Connector Assembly Automation - No electronic documents currently available
Home | About KC's | Design Process | Documents | Tools | Case Studies | References